|
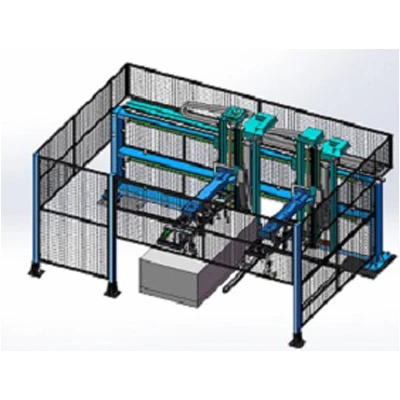
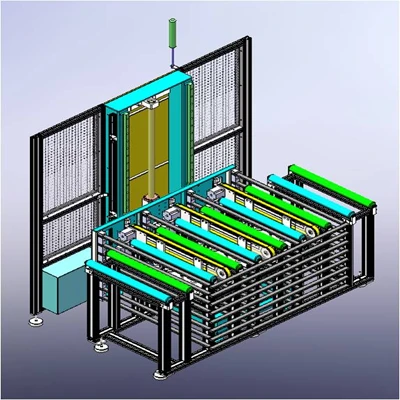
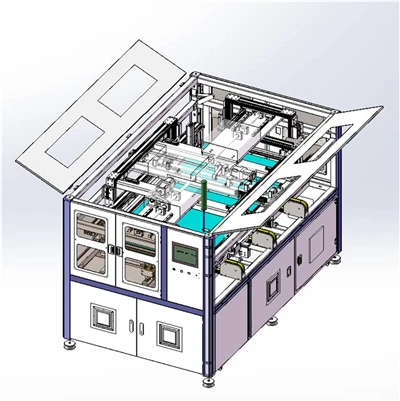
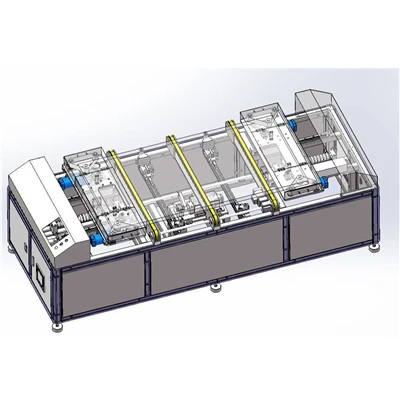
Funktion und Einführung
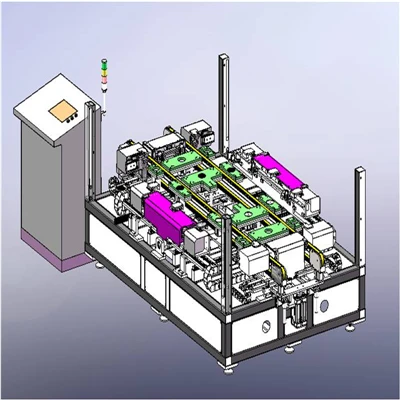
Ergreifen Sie das Glas und legen Sie es auf die Übertragungsleitung.
1.Das Glasladesystem besteht aus einem Glasbewegungsroboterarm und einem Papiersammelroboterarm.
2. Die Maschine enthält zwei Glaslagerstationen und eine Papierlagerstation.
3. Der Roboterarm, der das Glas bewegt, legt das Glas auf die Übertragungsleitung und entfernt gleichzeitig das Papier.
4. Die von einem Servomotor angetriebene Maschine zieht das Glas zur festgelegten Station.
5. Der Glasladeroboterarm hat eine freitragende Struktur und der Papiersammelroboterarm hat eine Portalstruktur.
Hauptparameter
Modulformat: (1580-2000)mm*(800-1000)mm
Zykluszeit :<35s
Max capacity: >2468/Tag
Betreiber online: keiner
Nennleistung: 8,26 kW
Druck: 0.7MPa+0.1
Eingangsspannung: 380 V
Abmessungen: 4610 mm x 2780 mm x 2150 mm
Vorteil
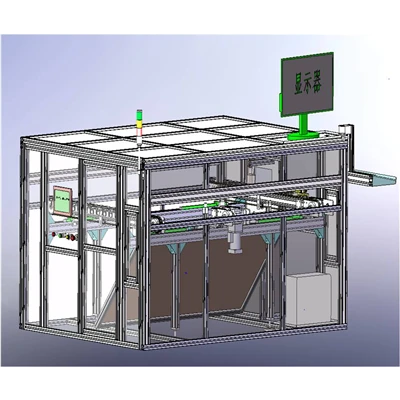
1.Die Maschine verwendet eine Stahlkonstruktion mit Schweißrahmenkörper, hohe Festigkeit, Zuverlässigkeit und Echtheit beim Laden.
2. Die Saugplatte des Glasträgers besteht aus Polyurethan, das beim Laden keine Abdrücke auf dem Glas hinterlässt.
3.Der Servomotor läuft präzise und stabil.
4. Die Maschine ist mit einem Sicherheitszaun ausgestattet, um die Betriebssicherheit zu gewährleisten.
5. Reduzieren Sie die Unsicherheit der Belastung durch den Bediener und steigern Sie die Leistung.
6. Die Maschine ist vollautomatisch und erfordert keinen menschlichen Eingriff.
|